Lua API
Lua is a tiny and extensible scripting language that’s designed to be power efficient and quick to learn. Frame features a complete Lua virtual machine based on the latest public release of Lua. Dedicated hardware APIs allow direct access to all of Frame’s peripherals at a high level so that developers can start building apps quickly and easily.
There’s no special cables or setup needed. Lua on Frame is accessed solely over Bluetooth, such that any user created host app can easily execute scripts by simply pushing Lua strings to the device.
To learn more how the underlying Bluetooth communication with Frame works, check out the Bluetooth section of the Building Apps page.
Library reference
This page describes all of the Frame specific Lua APIs available to the developer along with some helpful examples. Certain libraries allow for more low level access that can be used for debugging and hacking the various subsystems of Frame.
The API specification is still undergoing heavy development. Some of them may change over the coming month or so.
Display
The display engine of allows drawing of text, sprites and vectors. These elements can be layered atop one another simply in the order they are called, and then be displayed in one go using the show() function.
The Frame display is capable of rendering up to 16 colors at one time. These colors are preset by default, however each color can be overridden.
| API | Description |
|---|---|
frame.display.text(string, x, y, {color='WHITE', spacing=4}) | Prints the given string to the display at co-ordinates x and y. A color can optionally be provided to print the text in one of the palette colors. Valid options for color are: WHITE ,GREY ,RED ,PINK ,DARKBROWN ,BROWN ,ORANGE ,YELLOW ,DARKGREEN ,GREEN ,LIGHTGREEN ,NIGHTBLUE ,SEABLUE ,SKYBLUE or CLOUDBLUE. spacing can optionally be provided to adjust the character spacing of the printed text |
frame.display.vector() | Details coming soon |
frame.display.show() | Shows the drawn objects on the display |
Example
-- Display 'Hello world' at x = 50 and y = 100
frame.display.text('Hello world', 50, 100)
frame.display.show()
| Low level functions | Description |
|---|---|
frame.display.assign_color(color, r, g, b) | Changes the rendered color in slot color with a new color given by the components r, g, and b. Valid options for color are: VOID, WHITE ,GREY ,RED ,PINK ,DARKBROWN ,BROWN ,ORANGE ,YELLOW ,DARKGREEN ,GREEN ,LIGHTGREEN ,NIGHTBLUE ,SEABLUE ,SKYBLUE or CLOUDBLUE. Note that changing the VOID color will change the rendered background color of the display. The RGB components are internally converted to a 10bit YCbCr value that represents the true colorspace of the display. There may therefore be rounding errors for certain RGB combinations |
frame.display.assign_color_ycbcr(color, y, cb, cr) | Same as above, however the y, cb, and cr represent the true 10bit colorspace of the display. Each component has a range of 4, 3, and 3 bits respectively |
frame.display.bitmap(x, y, width, color_format, palette_offset, data) | Prints raw bitmap data to the display at co-ordinates x and y. width should be the width of the bitmap. color_format represents the total colors users, and should be either 2, 4, or 16. palette_offset offsets the colors indexed from the palette. If no offset is desired, set this to 0. data should be a string containing the bitmap data |
frame.display.set_brightness(brightness) | Sets the brightness of the display. Valid options for brightness are -2, -1, 0, 1, or 2. Note that higher brightness levels increase the likely-hood of burn-in if static pixels are shown for long periods of time on the display |
frame.display.set_register(register, value) | Allows hacking of the display registers. register and value should both be 8bit values |
Color Palette
The Frame display is capable of rendering up to 16 colors at a time. Each color is indexed 0-15, and are named in the following order: VOID, WHITE ,GREY ,RED ,PINK ,DARKBROWN ,BROWN ,ORANGE ,YELLOW ,DARKGREEN ,GREEN ,LIGHTGREEN ,NIGHTBLUE ,SEABLUE ,SKYBLUE or CLOUDBLUE. VOID represents the background (normally black) color. Each color can be overridden per frame to any 10bit YCbCr color from the colorspace shown below. This space contains a total of 1024 possible colors.
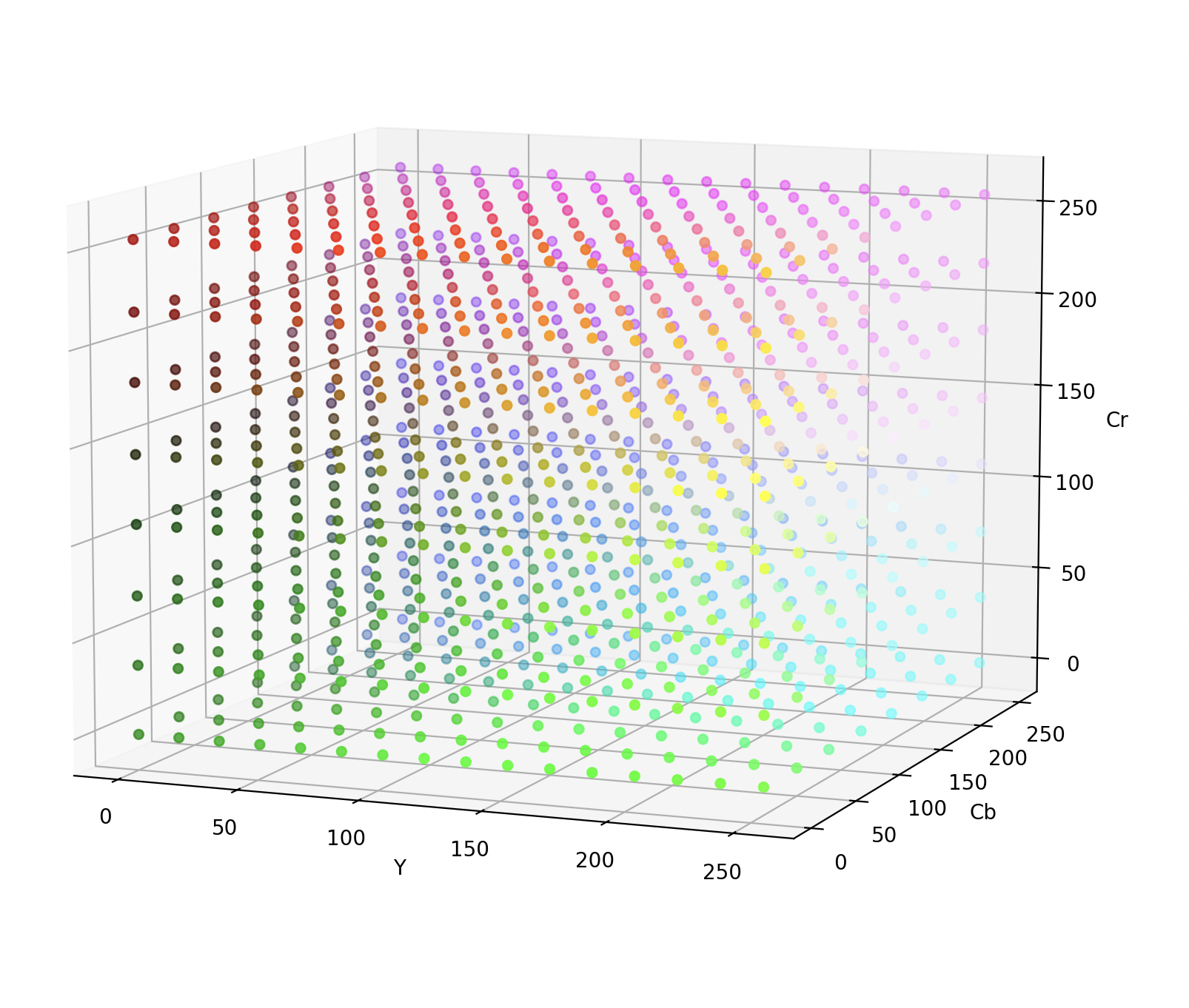
The assign_color() function simplifies color selection by allowing the user to enter regular 24bit RGB values which are internally converted to the YCbCr colorspace. Note however that the color actually rendered will be rounded to one of the above colors.
Sprite Engine
The sprite engine in Frame is capable of quickly rendering bitmap data to anywhere on the screen. Sprites data can be stored in one of three different color formats. 2 color, 4 color, and 16 color. 2 color mode will only use the first two colors in the color palette, but allows storing 8 pixels per byte of sprite data. 4 color will use the first four colors in the palette, but requires twice as much data per pixel. Finally, 16 color mode allows accessing the entire color palette, but requires 4 bits per pixel. Pixel data in Lua is simply represented as a long string of all the pixels. The width parameter tells the sprite engine when to move to the next line when rendering out each pixel from the string.
Each pixel represented by the pixel data simply indexes one of the colors from the color palette. For 2 color mode, a bit (pixel) value of 1 will print a pixel of color WHITE. The internal font glyphs used by the text() function are essentially all 2 color sprites.
To achieve different color text, the palette_offset feature is used. This value offsets how the colors are indexed during the render. Using the same 2 color example as above, but combined with a palette_offset value of 3, now indexes PINK instead of WHITE for all pixel values of 1. The same works for all the other color modes. Note that the VOID color is never shifted. A pixel value of 0 will always index VOID, no matter the palette_offset.
The example below shows how a single sprite can be shown in different colors using the palette_offset feature. Note how the color palette has been adjusted to repeat the same colors after index 5, but with red changed to green.
![]()
Camera
The camera capability of Frame allows for capturing and downloading of single JPEG images over Bluetooth. The sensor’s full resolution is 1280x720 pixels in portrait orientation, however only square images up to 720x720 pixels can be captured at a time. The user can select which portion of the sensor’s window is captured using the pan control. Additionally, the resolution of the capture can be cropped to either 360x360, 240x240 or 180x180 by using the zoom function. Smaller resolutions will increase the image quality, however the quality factor can be reduced to decrease the image file size, and increase download speeds of the image over Bluetooth.
| API | Description |
|---|---|
frame.camera.capture{quality_factor=50} | Captures a single image from the camera. The quality_factor option can help reduce file sizes by adjusting the JPEG quality. The four possible options are 10, 25, 50, and 100. Higher values represent higher quality, but also larger file sizes. |
frame.camera.read(num_bytes) | Reads out a number of bytes from the camera capture memory as a byte string. Once all bytes have been read, nil will be returned |
frame.camera.auto{metering='AVERAGE', exposure=0, shutter_kp=0.1, gain_kp=1.0, gain_limit=248.0} | Runs the automatic exposure and gain algorithm. This function must be called every 100ms for the best performance. metering can be one of three modes, SPOT, CENTER_WEIGHTED, or AVERAGE. exposure can be a value between -2.0 and 2.0 where lower values will return slightly darker images, and higher values will return slightly brighter images. shutter_kp and gain_kp allow fine tuning of the auto exposure algorithm. Higher values can make reaching the desired exposure faster, but may result in instability and oscillation of the control loop. These values are generally more sensitive when using the SPOT or CENTER_WEIGHTED metering modes. gain_limit can be used to cap the gain to below the maximum of 248. This is useful to reduce noise in darker scenes and results in faster exposure when going from darker to brighter scenes. |
Example
local mtu = frame.bluetooth.max_length()
-- Auto expose for 3 seconds
for _=1, 30 do
frame.camera.auto{}
frame.sleep(0.1)
end
-- Capture an image using default settings
frame.camera.capture{} -- NOTE: for devices running firmware prior to v24.179.0818, the {} should be ()
while true do
local data = frame.camera.read(mtu)
if data == nil then
break
end
bluetooth.send(data)
end
| Low level functions | Description |
|---|---|
frame.camera.sleep() | Puts the camera to sleep and reduces power consumption. Note the frame.sleep() function will automatically put the camera to sleep |
frame.camera.wake() | Wakes up the camera if it has previously been asleep. Note that following wakeups from frame.sleep() automatically wakes up the camera |
frame.camera.set_exposure(shutter) | Sets the shutter value manually. Note that camera.auto{} will override this value. shutter can be a value between 4 and 16383 |
frame.camera.set_gain(gain) | Sets the gain value manually. Note that camera.auto{} will override this value. gain can be a value between 0 and 248 |
frame.camera.set_white_balance(r, g, b) | Sets the digital gains of the R, G and B channels for fine tuning white balance. r, g and b can be values between 0 and 1023 |
frame.camera.set_register(address, value) | Allows for hacking the camera’s internal registers. address can be any 16-bit register address of the camera, and value any 8-bit value to write to that address |
Microphone
The microphone on Frame allows for streaming audio to a host device in real-time. Transfers are limited by the Bluetooth bandwidth which is typically around 40kBps under good signal conditions. The audio bitrate for a given sample_rate and bit_depth is: sample_rate * bit_depth / 8 bytes per second. An internal 32k buffer automatically compensates for additional tasks that might otherwise briefly block Bluetooth transfers. If this buffer limit is exceeded however, then discontinuities in audio might occur.
| API | Description |
|---|---|
frame.microphone.start{sample_rate=8000, bit_depth=8} | Starts streaming mic data into the internal 32k buffer. sample_rate may be either 8000, or 16000, and bit_depth may be either 8, 16 |
frame.microphone.stop() | Stops the stream |
frame.microphone.read(num_bytes) | Reads out a number of bytes from the buffer. If all bytes have been read, but streaming is still active, an empty string will be returned. Once the stream has been stopped and all bytes have been read, then nil will be returned |
Example
local mtu = frame.bluetooth.max_length()
frame.microphone.start{sample_rate=16000} -- Start streaming at 16kHz 8bit
-- Streams forever
while true do
data = frame.microphone.read(mtu)
-- Calling frame.microphone.stop() will allow this to break the loop
if data == nil then
break
end
-- If there's data to send then ...
if data ~= '' then
-- Try to send the data as fast as possible
while true do
-- If the Bluetooth is busy, this simply trys again until it gets through
if (pcall(frame.bluetooth.send, data)) then
break
end
end
end
end
Motion sensor (IMU)
The IMU API allows reading both accelerometer and compass data, as well as assigning a callback function for tap gestures.
The tap gesture will always wake up Frame from frame.sleep().
| API | Description |
|---|---|
frame.imu.direction() | Returns a table containing the roll, pitch and heading angles of the wearer’s head position |
frame.imu.tap_callback(handler) | Assigns a callback to the tap gesture. handler must be a function, or can be nil to deactivate the callback |
| Low level functions | Description |
|---|---|
frame.imu.raw() | Returns a table of the raw accelerometer and compass measurements. Each containing a table with x, y, and z values |
Example
print(frame.imu.direction()['pitch']) -- Prints the angle of the wears head (up or down)
function tapped() -- Prints 'tapped' whenever the user taps the side of their Frame
print('tapped')
end
frame.imu.tap_callback(tapped)
Bluetooth
The Bluetooth API allows for sending and receiving raw byte data over Bluetooth. For a full description of how this can be used, check out the Bluetooth section of the Building Apps page.
| API | Description |
|---|---|
frame.bluetooth.address() | Returns the device MAC address as a 17 character string. E.g. 4E:87:B5:0C:64:0F |
frame.bluetooth.receive_callback(handler) | Assigns a callback to handle received Bluetooth data. handler must be a function, or can be nil to deactivate the callback |
frame.bluetooth.max_length() | Returns the maximum length of data that can be sent or received in a single transfer |
frame.bluetooth.send(data) | Sends data to the host device. data must be a string, but can contain byte values including 0x00 values anywhere in the string. The total length of the string must be less than or equal to frame.bluetooth.max_length() |
Example
function get_data(data) -- Called everytime byte data arrives to Frame
print(data)
end
frame.bluetooth.receive_callback(get_data)
frame.bluetooth.send('\x10\x12\x00\xFF') -- Sends the bytes: 0x10, 0x12, 0x00, 0xFF to the host
File system
The file system API allows for writing and reading files to Frame’s non-volatile storage. These can include executable Lua scripts, or other user files.
| API | Description |
|---|---|
frame.file.open(filename, mode) | Opens a file and returns a file object. filename can be any name, and mode can be either 'read', 'write', or 'append'. |
frame.file.remove(name) | Removes a file or directory of given name |
frame.file.rename(name, new_name) | Renames a file or directory of given name to new_name |
frame.file.listdir(directory) | Lists all files in the directory path given. E.g. '/' for the filesystem root directory. The list is returned as a table with name, size, and type |
frame.file.mkdir(pathname) | Creates a new directory with the given pathname |
f:read(*num_bytes) | Reads a number of bytes from a file. If no argument is give, the whole line is returned |
f:write(data) | Writes data to the file. data must be a string and can contain any byte data |
f:close() | Closes the file. It is important to close files once done writing, otherwise they may become corrupted |
Example
frame.file.mkdir('/my_files') -- Make a new directory
f = frame.file.open('/my_files/log.txt', 'write') -- Create a new file (or overwrite if it exists)
f:write('Log:\n')
f:close()
f = frame.file.open('/my_files/log.txt', 'append') -- Append two lines to the file
f:write('Logged a new line\n')
f:close()
f = frame.file.open('/my_files/log.txt', 'append')
f:write('Logged another line\n')
f:close()
-- Print all the files in the directory
local files = frame.file.listdir('/my_files')
for index, data in ipairs(files) do
print(index)
for key, value in pairs(data) do
print('\t', key, value)
end
end
Time functions
The time functions allow for accurate timekeeping on Frame. The utc() function can be used to set the time on Frame using a UTC timestamp. Frame will then keep the time until it’s put back onto charge, or placed into deep sleep using frame.sleep(). The date() function can be used to return a human readable time and date.
| API | Description |
|---|---|
frame.time.utc(*timestamp) | Sets or gets the current time. timestamp can be provided as a UTC timestamp to set the internal real-time clock. If no argument is given, Frame’s current time is returned as a UTC timestamp. If no timestamp was initially set, this number will simply represent the powered on time of Frame in seconds. |
frame.time.zone(*offset) | Sets or gets the timezone offset. If offset is given, the timezone will be set, otherwise the currently set timezone is returned. The format of the timezone should be a string, e.g. ‘-7:00’, or ‘5:30’. |
frame.time.date(*timestamp) | Returns a table containing second, minute, hour, day, month, year, weekday, day of year, and is daylight saving. If the optional timestamp argument is given, that timestamp will be used to calculate the corresponding date. |
Example
frame.time.utc(1708551112) -- Set the current time to Wed Feb 21 2024 21:31:52 UTC
frame.time.zone('-7:00') -- Set the timezone to pacific time
local time_now = frame.time.date()
-- print the local time and date
print(time_now['hour'])
print(time_now['minute'])
print(time_now['month'])
print(time_now['day'])
System functions
The system API provides miscellaneous functions such as sleep and update. It also contains some low level functions which are handy for developing apps and custom FPGA images.
| API | Description |
|---|---|
frame.FIRMWARE_VERSION | Returns the current firmware version as a 12 character string. E.g. 'v24.046.1546' |
frame.GIT_TAG | Returns the current firmware git tag as a 7 character string. E.g. '4a6ea0b' |
frame.battery_level() | Returns the battery level as a percentage between 1 and 100 |
frame.sleep(*seconds) | Sleeps for a given number of seconds. seconds can be a decimal number such as 1.25. If no argument is given, Frame will go to sleep until a tap gesture wakes it up |
frame.update() | Reboots Frame into the firmware bootloader. Check the firmware updates section of the Building Apps page to see how this is used |
| Low level functions | Description |
|---|---|
frame.stay_awake(enable) | Prevents Frame from going to sleep while it’s docked onto the charging cradle. This can help during development where continuous power is needed, however may degrade the display or cause burn-in if used for extended periods of time |
frame.fpga_read(address, num_bytes) | Reads a number of bytes from the FPGA at the given address |
frame.fpga_write(address, data) | Writes data to the FPGA at a given address. data can be a string containing any byte values |